The
goal
of
this
project
was
to
develop
visualization
methods
for
the
interpretation
and
analysis
of
time-varying
voxel
concentrations
from
a
particle
propagation simulation….

Country-Wide 3D Plume Modelling
and Rendering (ongoing)



We
propose
a
camera
system
that
uses
an
array
of
16
individually
driven
cellphone
sensors
that
achieve
a
combined
resolution
of
up
210
MegaPixels
with
360
x
45
degreee
coverage.
This
system
demonstrates
stereoscopic
pairs
which
serve
to
easily
derive
depth,
while
maintaining
a
resolving
power
of
3
cm
at
100m
with
a
framerate
of
up
to
30
Hz,
equivalent
to
the
human
resolving
power.
The
assembly
highlights
a
novel
vision
capability
for
ground
vehicles,
where
object
detection
and
odometry
is
enabled
for
“far-ahead”
planning
and
safe
operation of vehicles.

StarCAM: High Resolution Stereoscopic
360 Camera (ongoing)

Geometry,
appearance
and
context
are
essential
aspects
to
capture
in
the
digital
documentation
of
cultural
heritage
sites.
Geometry
must
be
accurate
and
should
provide
a
level
of
precision
necessary
for
quantified
diagnostics.
Visual
appearance
should
capture
the
“as-is”
state,
while
site
specific
context
is
important
for
correlation, interpretation and analysis…
Heritage Diagnostic Imaging



Arma
Veirana
is
a
Middle/Upper
Paleolithic
cave
site
of
the
Maritime
Alps
of
Liguria,
Italy,
which
has
the
potential
to
unfold
knowledge
on
the
interaction
between
Modern Humans and the Neandertals…
Archaeological 3D Imaging- Arma Veirana





With
the
emergence
of
low-cost
multicopters
on
the
market,
archaeologists
have
rapidly
integrated
aerial
imaging
and
photogrammetry
with
more
traditional
methods of site documentation…
UAV Based LiDAR Imaging of Maya Ruins




© dominique-meyer.com 2019
RESEARCH
Recent
advances
in
robotic
control
and
autonomous
systems
have
driven
the
need
for
robust,
fast
and
accurate
estimations
of
surrounding
environments
and
motions
of
objects
within.
Stereo
depth
estimation
has
been
a
widely
adopted
method
to
estimate
the
geometry
of
a
scene
from
a
pair of cameras…
FPGA Accelerated 3D Vision (ongoing)


Recent
advances
in
robotic
control
and
autonomous
systems
have
driven
the
need
for
robust,
fast
and
accurate
estimations
of
surrounding
environments
and
motions
of
objects
within.
Stereo
depth
estimation
has
been
a
widely
adopted
method
to
estimate
the
geometry
of
a
scene
from
a
pair
of
cameras.
From
the
disparity
in
features
across
two
sets
of
images,
it
is
possible
to
estimate
the
distance
for
each
respective
feature
and
create
a
depth
map.
Autonomous
vehicles
benefit
from
frequent
estimates
of
the
surroundings,
and
as
such
video-rate
stereo
depthmaps
are
a
common
target
throughout
literature.
The
driving
limitation
in
existent
implementations
is
the
lack
resolution
that
is
achieved
at
these
frame
rates
when
the
computation
is
completed
in
software
on
general
purpose
processors,
namely
low-power
ARM
processors.
GPU
accelerations
have
demonstrated
higher
resolutions
depth
estimates
for
the
same
frame-rate,
and
recently
dedicated
hardware architectures have been proven to even further accelerate such tasks.
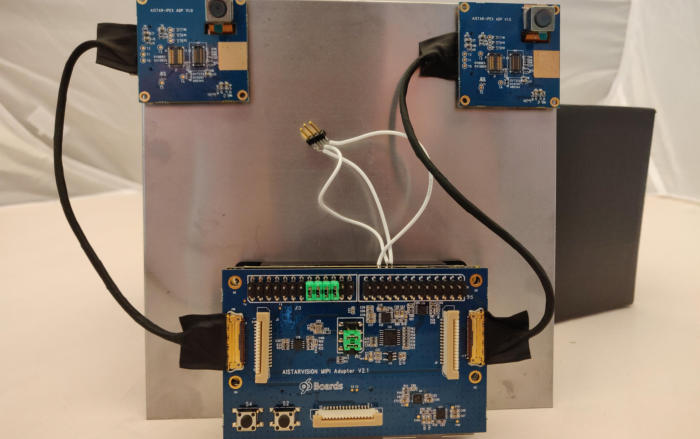
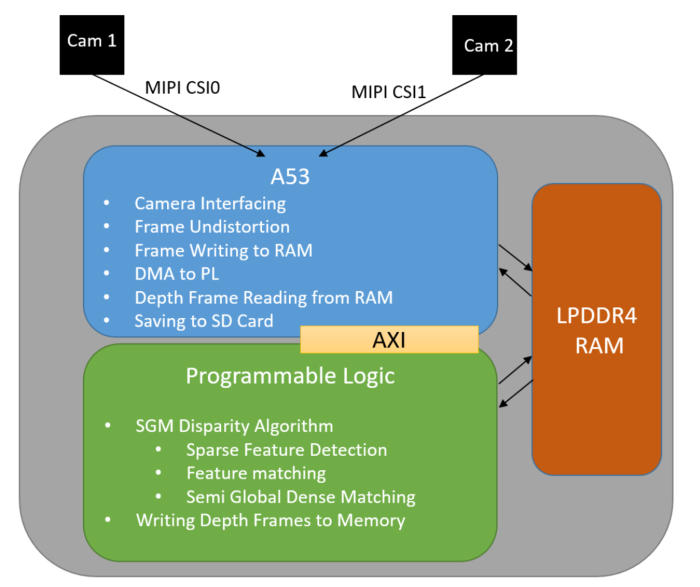
This
project
proposes
a
hardware
accelerated
dense
stereo
depth
camera
with
a
targeted
operation
of
1920x1080
pixels
at
30
frames
per
second,
operating
on
a
fully
integrated
Xilinx
MPSoC,
with
parts
of
the
capture
and
computation
accelerated
on
the
programmable
logic
and
the
rest
running
on
the
quad-core
ARM
A53
processors.
This
High
Level
Synthesis
driven
project
highlights
the
ease
of
integration
for
complex
embedded
systems,
while
maintaining
optimal
performance
and customizability.

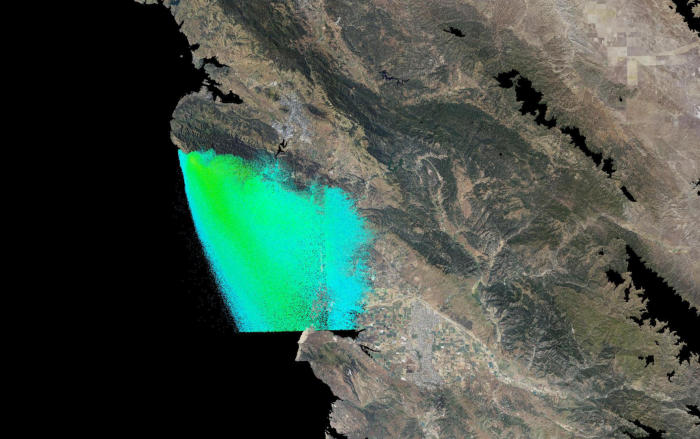
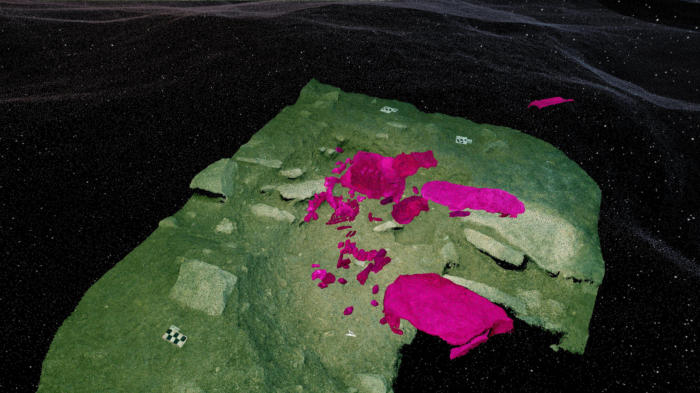
The
goal
of
this
project
was
to
develop
visualization
methods
for
the
interpretation
and
analysis
of
time-
varying
voxel
concentrations
from
a
particle
propagation
simulation.
A
simulated
plume
provided
3d
spatial
concentration
values
at
1
minute
intervals
for
16
hours
in
proximity
to
the
Diablo
Power
Plant.
From
this
plume,
we
wanted
to
model
with
representative
colors
how
this
plume
propagated
in
relation
to
the
coastal
environment
at
different
altitudes.
With
a
high
resolution
3D
terrain
model,
we
were
able
to
visualize
the
plume
evolution
at
a
desired
playback
speed.
Future
works
will
focus
on
sensory
measurement
analysis
of
this
plume
in
the
environment
and
the
visualization
of such nodes.

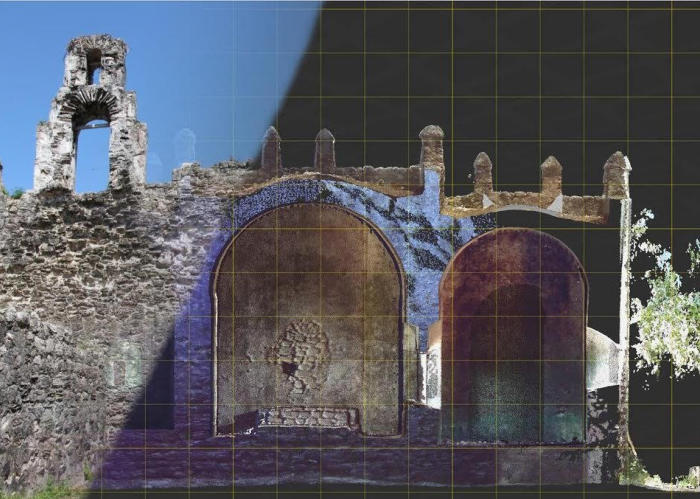
Geometry,
appearance
and
context
are
essential
aspects
to
capture
in
the
digital
documentation
of
cultural
heritage
sites.
Geometry
must
be
accurate
and
should
provide
a
level
of
precision
necessary
for
quantified
diagnostics.
Visual
appearance
should
capture
the
“as-is”
state,
while
site
specific
context
is
important
for
correlation,
interpretation
and
analysis.
Light
detection
and
ranging
(LiDAR)
has
established
itself
as
the
premier
laser
scanning
modality
for
the
acquisition
of
trusted
geometry,
while
photogrammetry
techniques
like
structure
from
motion
(SfM)
are
used
to
construct
visually
compelling
models.
A
common
challenge
of
these
line-of-sight
techniques
is
that
the
imaging
equipment
must
be
systematically
moved
throughout
the
target
environment
to
assure
that
the
data
captures
the
entire
target
and
allows
for
the
removal
of
occlusions
in
the
final
model.
By
combining
terrestrial
and
airborne
imaging
techniques
using
unmanned
aerial
vehicles
(UAV),
also
frequently
referred
to
as
drones,
it
is
possible
to
streamline
the
acquisition
of
the
target
data
sets.
This
research
focuses
on
the
fusion
of
full
resolution
three-dimensional
data
streams
generated
from
laser
scanning,
ground
based
photogrammetry
and
drone
based
photogrammetry.
Maintaining
full
resolution
of
the
data
sets
allows
for
diagnostic
analysis
of
very
subtle
deformations
and
defects
like
erosion
and
cracks.
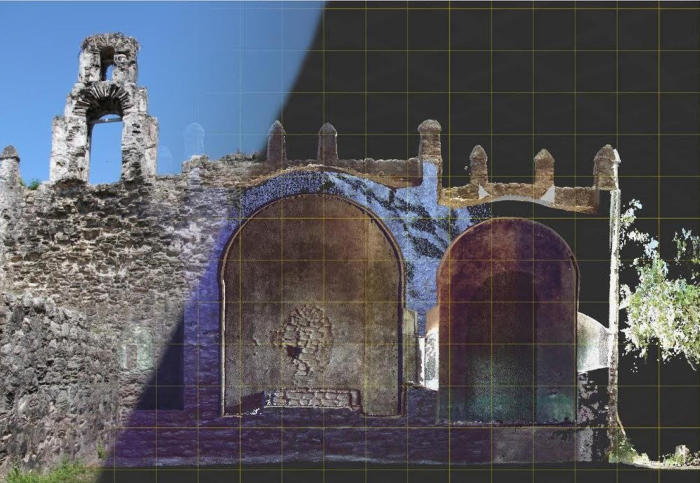
In
a
presented
case
study
in
Mexico,
terrestrial
laser
scanning
serves
as
a
geometric
scaffold
that
the
photogrammetry
data
is
registered
to
in
order
to
generate
a
holistic
model
of
a
one
hectare
site
containing
two
historic
structures.
The
laser
scanning
and
photogrammetry
data
sets
have
sufficient
overlap
to
enable
fusion,
and
more
importantly
the
individual
sets
can
supplement
each
other,
providing
geometry,
photorealism and context that the other set lacks.
Arma
Veirana
is
a
Middle/Upper
Paleolithic
cave
site
of
the
Maritime
Alps
of
Liguria,
Italy,
which
has
the
potential
to
unfold
knowledge
on
the
interaction
between
Modern
Humans
and
the
Neandertals.
Preliminary
excavations
have
shown
a
continuous
occupation
between
the
Middle
and
Upper
Paleolithic
time
periods,
yet
the
complexity
of
the
cave
morphology
and
geology
have
made
it
difficult
to
isolate
erosion,
environmental
and
non-natural
factors
to
understand
the
full
image
of
hominin
interaction
and
prehistoric
life.
We
propose
a
novel
method
to
rapidly
combine
and
visualize
timelapsed
Photogrammetric
and
LIDAR
data
of
the
cave
excavations.
This
enables
archaeologists
to
evaluate
and
analyze
the
layers
and
artifacts
of
the
excavation
within
the
context
of
the
cave.
Through
a
better
understanding
and
visualization
of
the
cave
excavation
over
time,
it
is
expected
to
further
link
micro
and
macro factors of the site which would otherwise not have been as apparent.

With
the
emergence
of
low-cost
multicopters
on
the
market,
archaeologists
have
rapidly
integrated
aerial
imaging
and
photogrammetry
with
more
traditional
methods
of
site
documentation.
Unmanned
Aerial
Vehicles
(UAVs)
serve
as
simple
yet
transformative
tools
that
can
rapidly
map
archaeological
sites
with
increased
efficiency
and
higher
resolution
than
manual
measurements
while
contextualizing
the
site
within
the
landscape
at
costs
significantly
cheaper
than
plane-based
aerial
LiDAR
systems
and
total
stations.
UAV
drones
serve
as
a
cost-effective
platform,
and
Structure
From
Motion
(SFM)
an
ideal
entry
point
for
further
adoption
of
diagnostic
imaging
to
facilitate
efficient
site
mapping
and
offer
archaeologists
innovative
ways
to
visualize
and
analyze
data.
The
aim
of
the
aerial
surveying
was
to
obtain
an
accurate
Digital
Elevation
Model
(DEM)
of
multiple
sites
which
could
be
compared
to
models
which
were
created
using
ground
total
stations
as
well
as
plane based LIDAR.
© dominique-meyer.com 2019
RESEARCH
The
goal
of
this
project
was
to
develop
visualization
methods
for
the
interpretation
and
analysis
of
time-varying
voxel
concentrations
from
a
particle
propagation simulation….

Country-Wide 3D Plume Modelling
and Rendering (ongoing)


Arma
Veirana
is
a
Middle/Upper
Paleolithic
cave
site
of
the
Maritime
Alps
of
Liguria,
Italy,
which
has
the
potential
to
unfold
knowledge
on
the
interaction
between
Modern Humans and the Neandertals…

Archaeological 3D Imaging- Arma Veirana


With
the
emergence
of
low-cost
multicopters
on
the
market,
archaeologists
have
rapidly
integrated
aerial
imaging
and
photogrammetry
with
more
traditional
methods of site documentation…
UAV Based LiDAR Imaging of Maya Ruins


Geometry,
appearance
and
context
are
essential
aspects
to
capture
in
the
digital
documentation
of
cultural
heritage
sites.
Geometry
must
be
accurate
and
should
provide
a
level
of
precision
necessary
for
quantified
diagnostics.
Visual
appearance
should
capture
the
“as-is”
state,
while
site
specific
context
is
important
for
correlation, interpretation and analysis…
Heritage Diagnostic Imaging


Recent
advances
in
robotic
control
and
autonomous
systems
have
driven
the
need
for
robust,
fast
and
accurate
estimations
of
surrounding
environments
and
motions
of
objects
within.
Stereo
depth
estimation
has
been
a
widely
adopted
method
to
estimate
the
geometry
of
a
scene
from
a
pair of cameras...

FPGA Accelerated 3D Vision (ongoing)



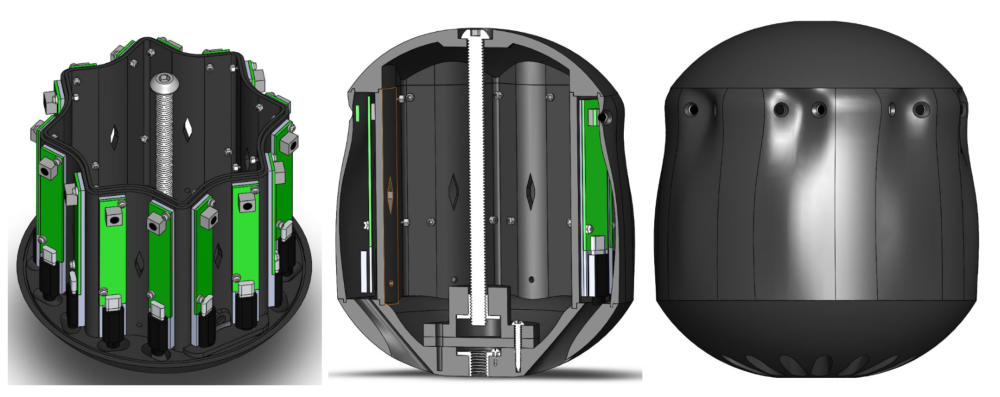
We
propose
a
camera
system
that
uses
an
array
of
16
individually
driven
cellphone
sensors
that
achieve
a
combined
resolution
of
up
210
MegaPixels
with
360
x
45
degreee
coverage.
This
system
demonstrates
stereoscopic
pairs
which
serve
to
easily
derive
depth,
while
maintaining
a
resolving
power
of
3
cm
at
100m
with
a
framerate
of
up
to
30
Hz,
equivalent
to
the
human
resolving
power.
The
assembly
highlights
a
novel
vision
capability
for
ground
vehicles,
where
object
detection
and
odometry
is
enabled
for
“far-ahead”
planning
and
safe
operation of vehicles.

StarCAM: High Resolution Stereoscopic
360 Camera (ongoing)

Recent
advances
in
robotic
control
and
autonomous
systems
have
driven
the
need
for
robust,
fast
and
accurate
estimations
of
surrounding
environments
and
motions
of
objects
within.
Stereo
depth
estimation
has
been
a
widely
adopted
method
to
estimate
the
geometry
of
a
scene
from
a
pair
of
cameras.
From
the
disparity
in
features
across
two
sets
of
images,
it
is
possible
to
estimate
the
distance
for
each
respective
feature
and
create
a
depth
map.
Autonomous
vehicles
benefit
from
frequent
estimates
of
the
surroundings,
and
as
such
video-
rate
stereo
depthmaps
are
a
common
target
throughout
literature.
The
driving
limitation
in
existent
implementations
is
the
lack
resolution
that
is
achieved
at
these
frame
rates
when
the
computation
is
completed
in
software
on
general
purpose
processors,
namely
low-power
ARM
processors.
GPU
accelerations
have
demonstrated
higher
resolutions
depth
estimates
for
the
same
frame-rate,
and
recently
dedicated
hardware
architectures
have
been
proven
to
even
further
accelerate such tasks.
This
project
proposes
a
hardware
accelerated
dense
stereo
depth
camera
with
a
targeted
operation
of
1920x1080
pixels
at
30
frames
per
second,
operating
on
a
fully
integrated
Xilinx
MPSoC,
with
parts
of
the
capture
and
computation
accelerated
on
the
programmable
logic
and
the
rest
running
on
the
quad-core
ARM
A53
processors.
This
High
Level
Synthesis
driven
project
highlights
the
ease
of
integration
for
complex
embedded
systems,
while
maintaining
optimal performance and customizability.
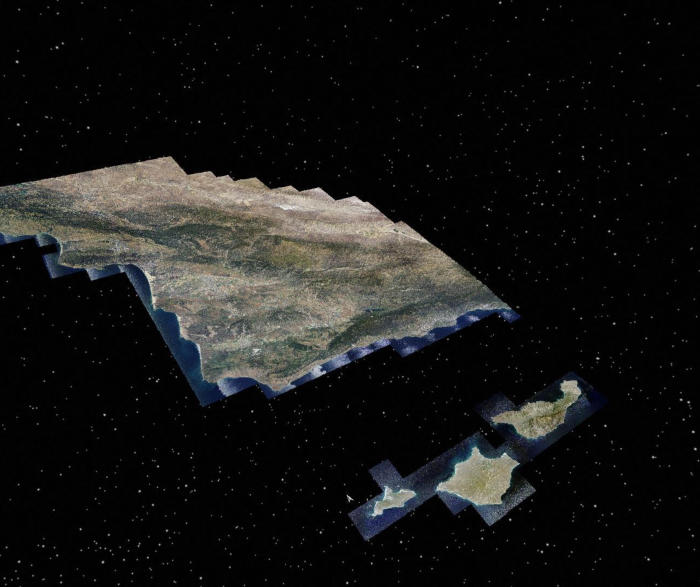
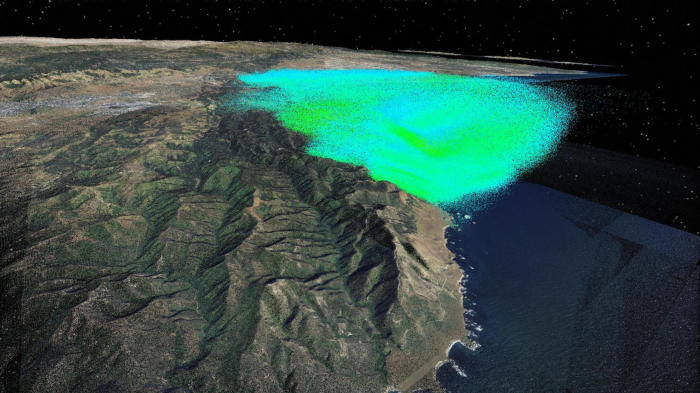
The
goal
of
this
project
was
to
develop
visualization
methods
for
the
interpretation
and
analysis
of
time-varying
voxel
concentrations
from
a
particle
propagation
simulation.
A
simulated
plume
provided
3d
spatial
concentration
values
at
1
minute
intervals
for
16
hours
in
proximity
to
the
Diablo
Power
Plant.
From
this
plume,
we
wanted
to
model
with
representative
colors
how
this
plume
propagated
in
relation
to
the
coastal
environment
at
different
altitudes.
With
a
high
resolution
3D
terrain
model,
we
were
able
to
visualize
the
plume
evolution
at
a
desired
playback
speed.
Future
works
will
focus
on
sensory
measurement
analysis
of
this
plume
in
the
environment
and
the
visualization
of
such
nodes.

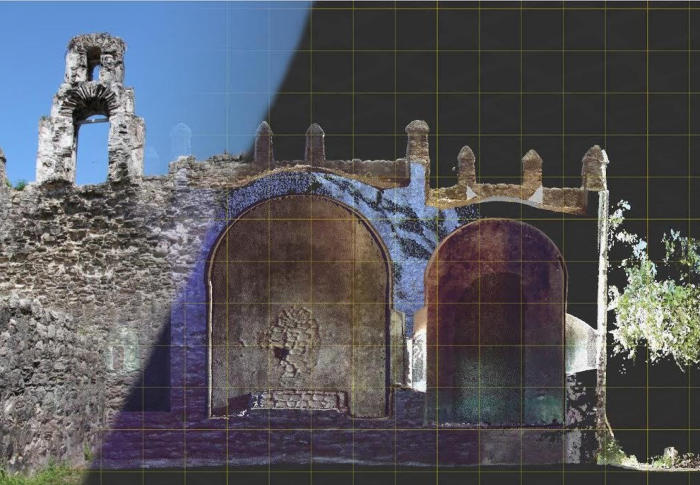
Geometry,
appearance
and
context
are
essential
aspects
to
capture
in
the
digital
documentation
of
cultural
heritage
sites.
Geometry
must
be
accurate
and
should
provide
a
level
of
precision
necessary
for
quantified
diagnostics.
Visual
appearance
should
capture
the
“as-is”
state,
while
site
specific
context
is
important
for
correlation,
interpretation
and
analysis.
Light
detection
and
ranging
(LiDAR)
has
established
itself
as
the
premier
laser
scanning
modality
for
the
acquisition
of
trusted
geometry,
while
photogrammetry
techniques
like
structure
from
motion
(SfM)
are
used
to
construct
visually
compelling
models.
A
common
challenge
of
these
line-of-sight
techniques
is
that
the
imaging
equipment
must
be
systematically
moved
throughout
the
target
environment
to
assure
that
the
data
captures
the
entire
target
and
allows
for
the
removal
of
occlusions
in
the
final
model.
By
combining
terrestrial
and
airborne
imaging
techniques
using
unmanned
aerial
vehicles
(UAV),
also
frequently
referred
to
as
drones,
it
is
possible
to
streamline
the
acquisition
of
the
target
data
sets.
This
research
focuses
on
the
fusion
of
full
resolution
three-dimensional
data
streams
generated
from
laser
scanning,
ground
based
photogrammetry
and
drone
based
photogrammetry.
Maintaining
full
resolution
of
the
data
sets
allows
for
diagnostic
analysis
of
very
subtle
deformations
and
defects
like
erosion
and
cracks.
In
a
presented
case
study
in
Mexico,
terrestrial
laser
scanning
serves
as
a
geometric
scaffold
that
the
photogrammetry
data
is
registered
to
in
order
to
generate
a
holistic
model
of
a
one
hectare
site
containing
two
historic
structures.
The
laser
scanning
and
photogrammetry
data
sets
have
sufficient
overlap
to
enable
fusion,
and
more
importantly
the
individual
sets
can
supplement
each
other,
providing
geometry,
photorealism
and
context
that the other set lacks.

Arma
Veirana
is
a
Middle/Upper
Paleolithic
cave
site
of
the
Maritime
Alps
of
Liguria,
Italy,
which
has
the
potential
to
unfold
knowledge
on
the
interaction
between
Modern
Humans
and
the
Neandertals.
Preliminary
excavations
have
shown
a
continuous
occupation
between
the
Middle
and
Upper
Paleolithic
time
periods,
yet
the
complexity
of
the
cave
morphology
and
geology
have
made
it
difficult
to
isolate
erosion,
environmental
and
non-natural
factors
to
understand
the
full
image
of
hominin
interaction
and
prehistoric
life.
We
propose
a
novel
method
to
rapidly
combine
and
visualize
timelapsed
Photogrammetric
and
LIDAR
data
of
the
cave
excavations.
This
enables
archaeologists
to
evaluate
and
analyze
the
layers
and
artifacts
of
the
excavation
within
the
context
of
the
cave.
Through
a
better
understanding
and
visualization
of
the
cave
excavation
over
time,
it
is
expected
to
further
link
micro
and
macro
factors
of
the
site
which
would
otherwise
not
have
been
as apparent.

With
the
emergence
of
low-cost
multicopters
on
the
market,
archaeologists
have
rapidly
integrated
aerial
imaging
and
photogrammetry
with
more
traditional
methods
of
site
documentation.
Unmanned
Aerial
Vehicles
(UAVs)
serve
as
simple
yet
transformative
tools
that
can
rapidly
map
archaeological
sites
with
increased
efficiency
and
higher
resolution
than
manual
measurements
while
contextualizing
the
site
within
the
landscape
at
costs
significantly
cheaper
than
plane-based
aerial
LiDAR
systems
and
total
stations.
UAV
drones
serve
as
a
cost-effective
platform,
and
Structure
From
Motion
(SFM)
an
ideal
entry
point
for
further
adoption
of
diagnostic
imaging
to
facilitate
efficient
site
mapping
and
offer
archaeologists
innovative
ways
to
visualize
and
analyze
data.
The
aim
of
the
aerial
surveying
was
to
obtain
an
accurate
Digital
Elevation
Model
(DEM)
of
multiple
sites
which
could
be
compared
to
models
which
were
created
using
ground
total
stations as well as plane based LIDAR.
Recent advances in robotic control and
autonomous systems have driven the need
for robust, fast and accurate estimations
of surrounding environments and motions
of objects within. Stereo depth estimation
has been a widely adopted method to
estimate the geometry of a scene from a
pair of cameras…

FPGA Accelerated 3D Vision (ongoing)


© dominique-meyer.com 2019
RESEARCH
The
goal
of
this
project
was
to
develop
visualization
methods
for
the
interpretation
and
analysis
of
time-varying
voxel
concentrations
from
a
particle
propagation simulation….
Country-Wide 3D Plume Modelling
and Rendering (ongoing)



We
propose
a
camera
system
that
uses
an
array
of
16
individually
driven
cellphone
sensors
that
achieve
a
combined
resolution
of
up
210
MegaPixels
with
360
x
45
degreee
coverage.
This
system
demonstrates
stereoscopic
pairs
which
serve
to
easily
derive
depth,
while
maintaining
a
resolving
power
of
3
cm
at
100m
with
a
framerate
of
up
to
30
Hz,
equivalent
to
the
human
resolving
power.
The
assembly
highlights
a
novel
vision
capability
for
ground
vehicles,
where
object
detection
and
odometry
is
enabled
for
“far-ahead”
planning
and
safe
operation of vehicles.

StarCAM: High Resolution Stereoscopic
360 Camera (ongoing)

Geometry,
appearance
and
context
are
essential
aspects
to
capture
in
the
digital
documentation
of
cultural
heritage
sites.
Geometry
must
be
accurate
and
should
provide
a
level
of
precision
necessary
for
quantified
diagnostics.
Visual
appearance
should
capture
the
“as-is”
state,
while
site
specific
context
is
important
for
correlation, interpretation and analysis…
Heritage Diagnostic Imaging


Arma
Veirana
is
a
Middle/Upper
Paleolithic
cave
site
of
the
Maritime
Alps
of
Liguria,
Italy,
which
has
the
potential
to
unfold
knowledge
on
the
interaction
between
Modern Humans and the Neandertals…

Archaeological 3D Imaging- Arma Veirana


With
the
emergence
of
low-cost
multicopters
on
the
market,
archaeologists
have
rapidly
integrated
aerial
imaging
and
photogrammetry
with
more
traditional
methods of site documentation…

UAV Based LiDAR Imaging of Maya Ruins


Recent
advances
in
robotic
control
and
autonomous
systems
have
driven
the
need
for
robust,
fast
and
accurate
estimations
of
surrounding
environments
and
motions
of
objects
within.
Stereo
depth
estimation
has
been
a
widely
adopted
method
to
estimate
the
geometry
of
a
scene
from
a
pair
of
cameras.
From
the
disparity
in
features
across
two
sets
of
images,
it
is
possible
to
estimate
the
distance
for
each
respective
feature
and
create
a
depth
map.
Autonomous
vehicles
benefit
from
frequent
estimates
of
the
surroundings,
and
as
such
video-rate
stereo
depthmaps
are
a
common
target
throughout
literature.
The
driving
limitation
in
existent
implementations
is
the
lack
resolution
that
is
achieved
at
these
frame
rates
when
the
computation
is
completed
in
software
on
general
purpose
processors,
namely
low-power
ARM
processors.
GPU
accelerations
have
demonstrated
higher
resolutions
depth
estimates
for
the
same
frame-rate,
and
recently
dedicated
hardware architectures have been proven to even further accelerate such tasks.
This
project
proposes
a
hardware
accelerated
dense
stereo
depth
camera
with
a
targeted
operation
of
1920x1080
pixels
at
30
frames
per
second,
operating
on
a
fully
integrated
Xilinx
MPSoC,
with
parts
of
the
capture
and
computation
accelerated
on
the
programmable
logic
and
the
rest
running
on
the
quad-core
ARM
A53
processors.
This
High
Level
Synthesis
driven
project
highlights
the
ease
of
integration
for
complex
embedded
systems,
while
maintaining
optimal
performance
and customizability.

The
goal
of
this
project
was
to
develop
visualization
methods
for
the
interpretation
and
analysis
of
time-
varying
voxel
concentrations
from
a
particle
propagation
simulation.
A
simulated
plume
provided
3d
spatial
concentration
values
at
1
minute
intervals
for
16
hours
in
proximity
to
the
Diablo
Power
Plant.
From
this
plume,
we
wanted
to
model
with
representative
colors
how
this
plume
propagated
in
relation
to
the
coastal
environment
at
different
altitudes.
With
a
high
resolution
3D
terrain
model,
we
were
able
to
visualize
the
plume
evolution
at
a
desired
playback
speed.
Future
works
will
focus
on
sensory
measurement
analysis
of
this
plume
in
the
environment
and
the
visualization
of such nodes.

Geometry,
appearance
and
context
are
essential
aspects
to
capture
in
the
digital
documentation
of
cultural
heritage
sites.
Geometry
must
be
accurate
and
should
provide
a
level
of
precision
necessary
for
quantified
diagnostics.
Visual
appearance
should
capture
the
“as-is”
state,
while
site
specific
context
is
important
for
correlation,
interpretation
and
analysis.
Light
detection
and
ranging
(LiDAR)
has
established
itself
as
the
premier
laser
scanning
modality
for
the
acquisition
of
trusted
geometry,
while
photogrammetry
techniques
like
structure
from
motion
(SfM)
are
used
to
construct
visually
compelling
models.
A
common
challenge
of
these
line-of-sight
techniques
is
that
the
imaging
equipment
must
be
systematically
moved
throughout
the
target
environment
to
assure
that
the
data
captures
the
entire
target
and
allows
for
the
removal
of
occlusions
in
the
final
model.
By
combining
terrestrial
and
airborne
imaging
techniques
using
unmanned
aerial
vehicles
(UAV),
also
frequently
referred
to
as
drones,
it
is
possible
to
streamline
the
acquisition
of
the
target
data
sets.
This
research
focuses
on
the
fusion
of
full
resolution
three-dimensional
data
streams
generated
from
laser
scanning,
ground
based
photogrammetry
and
drone
based
photogrammetry.
Maintaining
full
resolution
of
the
data
sets
allows
for
diagnostic
analysis
of
very
subtle
deformations
and
defects
like
erosion
and
cracks.
In
a
presented
case
study
in
Mexico,
terrestrial
laser
scanning
serves
as
a
geometric
scaffold
that
the
photogrammetry
data
is
registered
to
in
order
to
generate
a
holistic
model
of
a
one
hectare
site
containing
two
historic
structures.
The
laser
scanning
and
photogrammetry
data
sets
have
sufficient
overlap
to
enable
fusion,
and
more
importantly
the
individual
sets
can
supplement
each
other,
providing
geometry,
photorealism and context that the other set lacks.
Arma
Veirana
is
a
Middle/Upper
Paleolithic
cave
site
of
the
Maritime
Alps
of
Liguria,
Italy,
which
has
the
potential
to
unfold
knowledge
on
the
interaction
between
Modern
Humans
and
the
Neandertals.
Preliminary
excavations
have
shown
a
continuous
occupation
between
the
Middle
and
Upper
Paleolithic
time
periods,
yet
the
complexity
of
the
cave
morphology
and
geology
have
made
it
difficult
to
isolate
erosion,
environmental
and
non-natural
factors
to
understand
the
full
image
of
hominin
interaction
and
prehistoric
life.
We
propose
a
novel
method
to
rapidly
combine
and
visualize
timelapsed
Photogrammetric
and
LIDAR
data
of
the
cave
excavations.
This
enables
archaeologists
to
evaluate
and
analyze
the
layers
and
artifacts
of
the
excavation
within
the
context
of
the
cave.
Through
a
better
understanding
and
visualization
of
the
cave
excavation
over
time,
it
is
expected
to
further
link
micro
and
macro factors of the site which would otherwise not have been as apparent.

With
the
emergence
of
low-cost
multicopters
on
the
market,
archaeologists
have
rapidly
integrated
aerial
imaging
and
photogrammetry
with
more
traditional
methods
of
site
documentation.
Unmanned
Aerial
Vehicles
(UAVs)
serve
as
simple
yet
transformative
tools
that
can
rapidly
map
archaeological
sites
with
increased
efficiency
and
higher
resolution
than
manual
measurements
while
contextualizing
the
site
within
the
landscape
at
costs
significantly
cheaper
than
plane-based
aerial
LiDAR
systems
and
total
stations.
UAV
drones
serve
as
a
cost-effective
platform,
and
Structure
From
Motion
(SFM)
an
ideal
entry
point
for
further
adoption
of
diagnostic
imaging
to
facilitate
efficient
site
mapping
and
offer
archaeologists
innovative
ways
to
visualize
and
analyze
data.
The
aim
of
the
aerial
surveying
was
to
obtain
an
accurate
Digital
Elevation
Model
(DEM)
of
multiple
sites
which
could
be
compared
to
models
which
were
created
using
ground
total
stations
as
well
as
plane based LIDAR.
Dominique E. Meyer





Dominique E. Meyer






Dominique E. Meyer